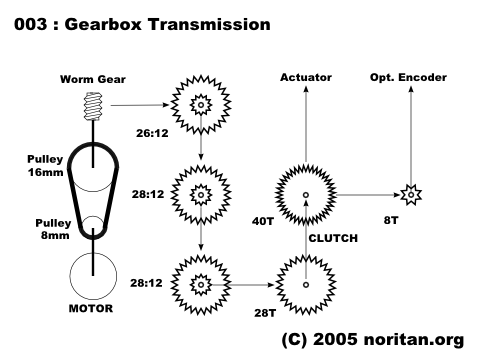
この号に付属していたギアボックスには、多くのギアが内蔵されていました。 それぞれのギアの歯の数と伝達経路は、以下の図のようになっています。

{kind=link}
私の計算に間違いが無ければ、 モータからアクチュエータまで約660倍の減速比になっています。 ほとんどの伝達が歯車で行われている中で、 二箇所だけ歯車では無いところがあります。
ベルトドライブ
モータから直接動力を取り出す部分には、 プーリーによるベルトドライブが使用されています。

ベルトを使うと、ベルトのスリップによって、エネルギーロスが発生します。 このため、動力の伝達手段としては良くないのですが、 ここでベルトが使用されているのには、二つほど理由がありそうです。
- モータに過負荷をかけない
- DCモータは、電流を供給しているときに回転が止まると、 その構造上、過大な電流が流れてしまい、焼損してしまう 恐れがあります。 この状態は、歯車が何らかの異常、 たとえば、歯車に何かがはさまったりして止まってしまうと、 発生します。 そこで、モータからの出力をベルトにすると、 たとえ歯車が止まっても、ベルトがスリップしてモータの 回転を止めないようにという仕掛けであろうと考えます。
- モータの取り付け自由度が大きい。
- モータは、ギアボックスの中にはめ込んであるだけで がっちりとは固定されていません。 モータの周囲に巻かれたゴムがモータを固定しています。 これは、モータの振動を他に伝えないようにという配慮から きているのだと理解しています。 ただ、この構造のままモータに歯車をつけてしまうと、 歯車がうまくかみ合わない恐れがあります。 そこで、自由度の大きいベルトを使ったものと考えます。 ベルトもモータの振動を伝えにくくする作用が期待できます。 上の写真を良く見ると、二つのプーリーが厳密には平行になって いないため、ベルトがねじれているのがわかります。
どちらも、組み立てキットならではの発想ですね。
クラッチ機構
このギアボックスの出力(アクチュエータ)に近い所に、 クラッチが入っています。

二つの白い歯車ががっちりとかみ合っているのがわかります。 歯車の右にある金属で出来た部品は、 この歯車をがっちりとかみ合わせるためについているばねです。 このクラッチ機構は、二つの歯車の間に「大きな力」がかかるとバネがゆるみ、 二つの歯車が空回りを始めます。 「大きな力」とは何かというと、 外からロボットの首を無理やり動かそうとする力です。 もし、クラッチ機構が無かった場合は、 歯車に直接力が加わるため、歯車が破損してしまいます。 子供向けのおもちゃには必須の機構です。
ロボットの首振り角度
ロボットの首の位置は、 オプチカルエンコーダによって検出されます。

つまり、オプチカルエンコーダによって首振り角度は決まります。 アクチュエータとオプチカルエンコーダは、 40Tと8Tの歯車で接続されているため、 オプチカルエンコーダの回転角度の5分の1の角度しか首を 振ることはできません。 オプチカルエンコーダのスリットは、150度の範囲に広がっているため、 ロボットの首振り角度は、約30度が限界という計算になります。